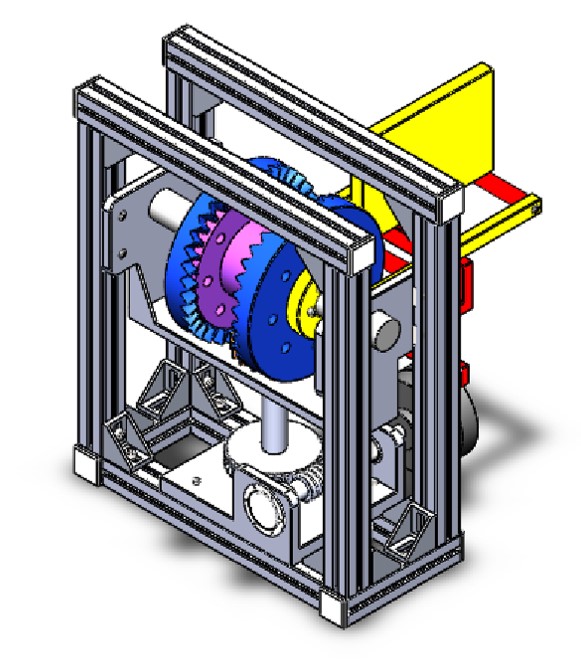
LiDAR SLAM point cloud processing
Research on line features recognition and extraction
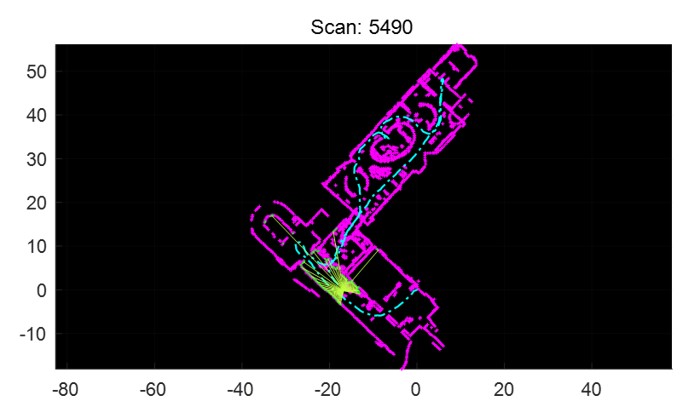

Research on line features recognition and extraction
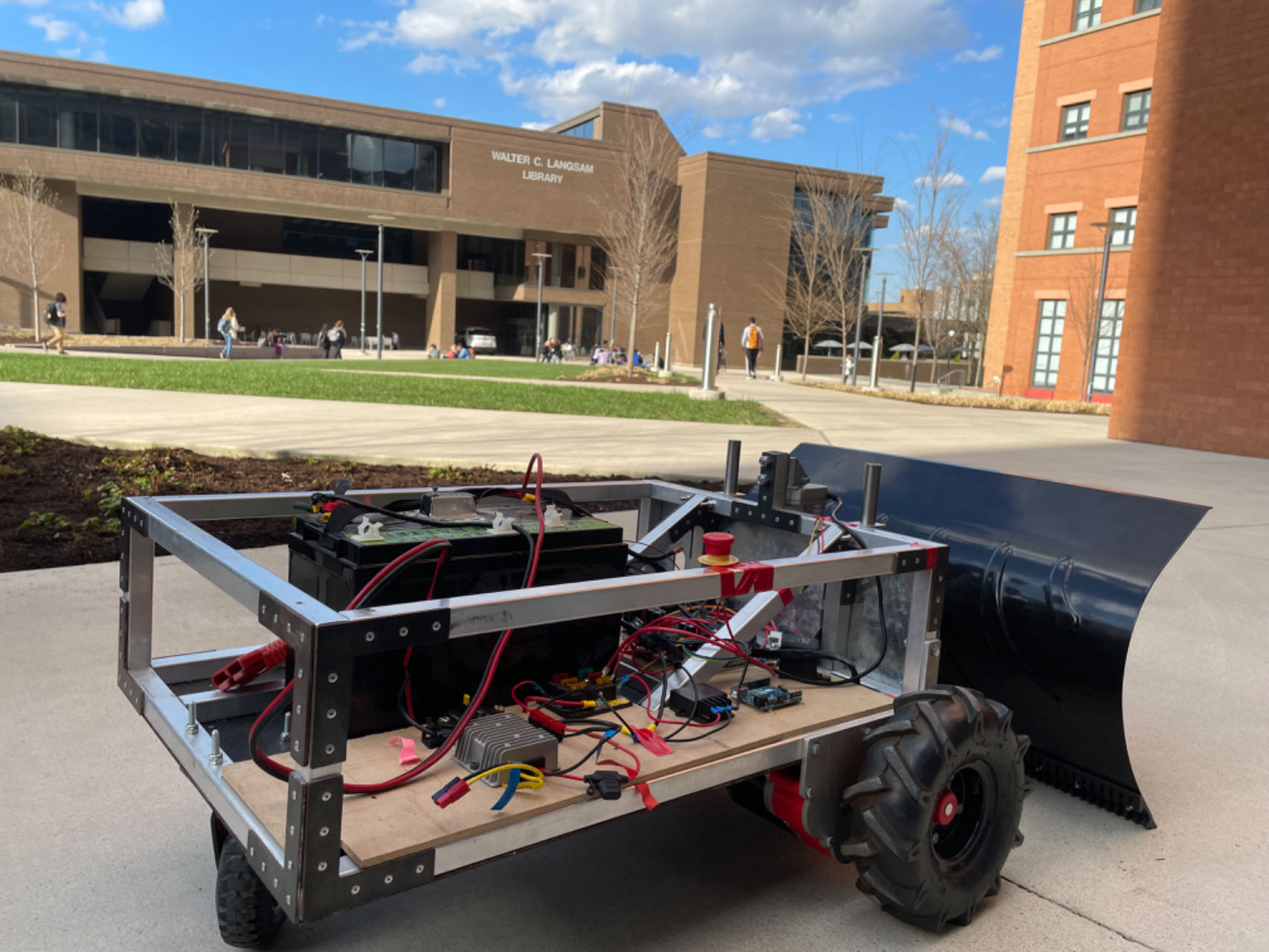
A robot that can clear light snow on specific paths in the UC campus.
ROB550 Group Project
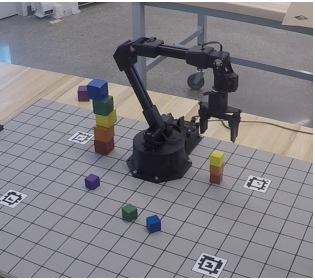
ROB550 Course Project
Undergraduate Innovation Project