LiDAR SLAM point cloud processing
Lidar slam w/ open source MATLAB framework. Research on line features recognition and extraction. Project is now available on my Github! github
In the beginning, I noted that the line features of the indoor environment are apparent, e.g.: the outlines of walls or tables. Therefore, I decided to utilize clustering and linear fitting to extract features in a single-scan point cloud.
Single scan feature extraction
The clusters were initially determined by the distance between points. This led to the incorrect classification of points around corners due to the narrow spacing. After I developed and applied a Corner Detection algorithm, an explicit linear characteristic was demonstrated for each cluster. Next, I implemented Principal Component Analysis to obtain the line segments’ slopes and endpoints.
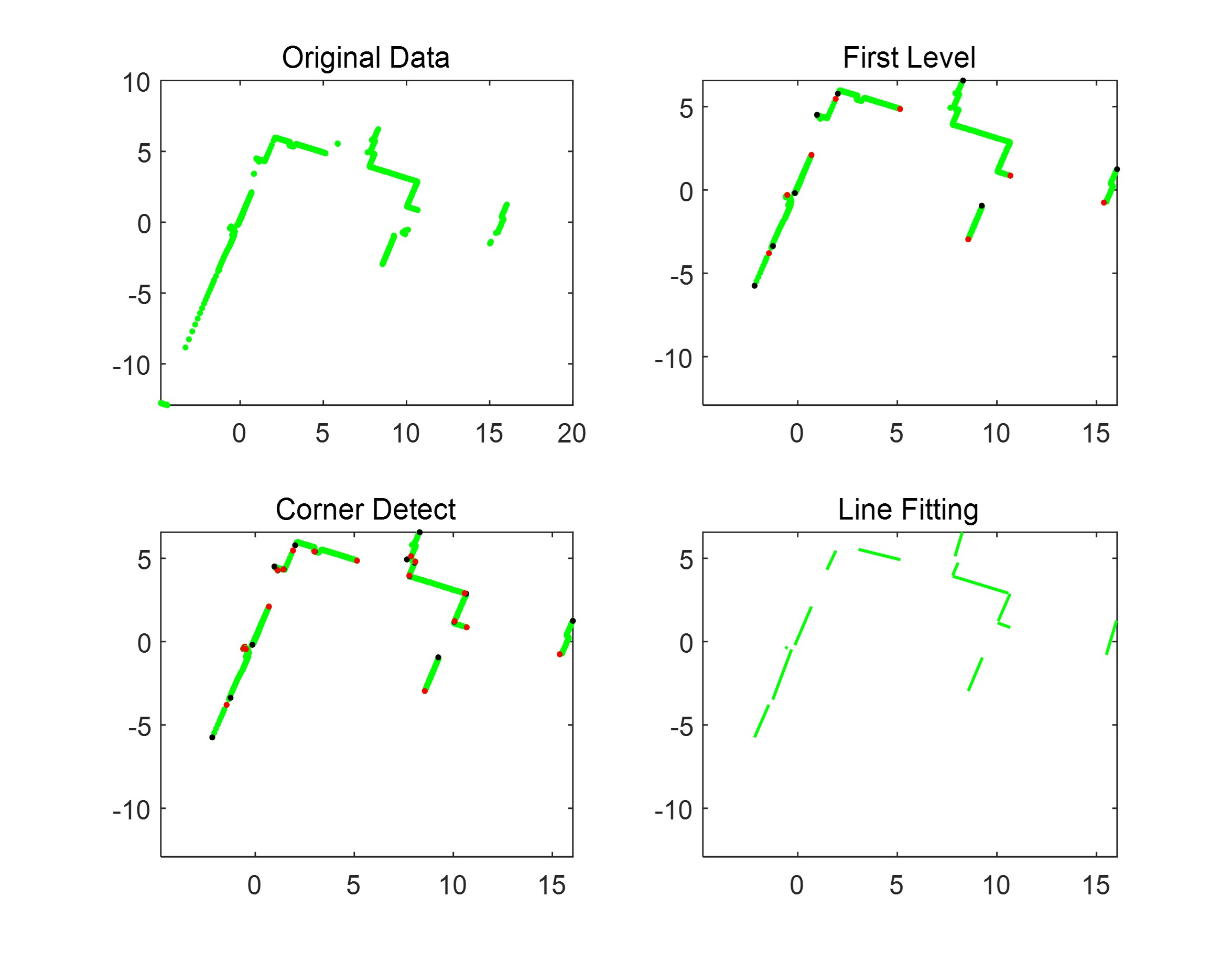 |
Figure 1. Single scan point cloud before/after processing |
Multi scan feature merge
In the last stage, density-based clustering was performed to fuse the features in multi-scan data. Specifically, I combined DBSCAN and Mean Shift clustering to process the data (the slope and two endpoints), enabling the potentially coincident lines to be labeled the same and merged.
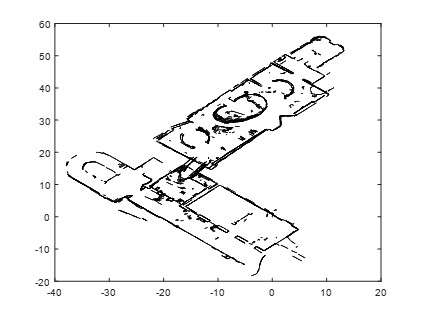 | 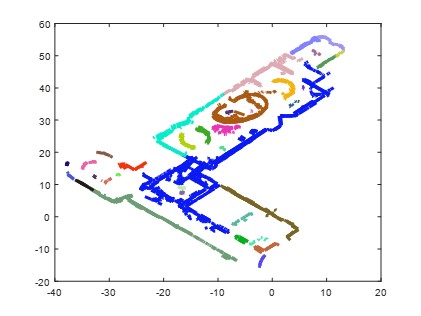 | 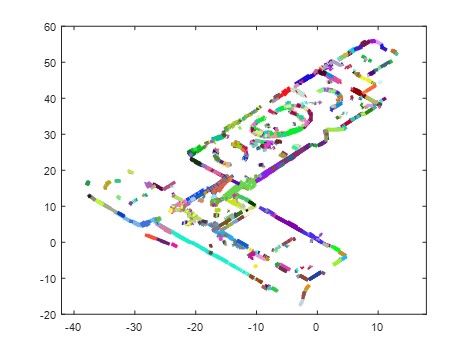 |
Figure 2. Origin data after line fitting | Figure 3. Data after DBSCAN | Figure 4. Data after Meanshift |
Result
The result showed that a 5522 by 1052 dataset could be reduced to 700 line segments, while the processing time was within 5 minutes.
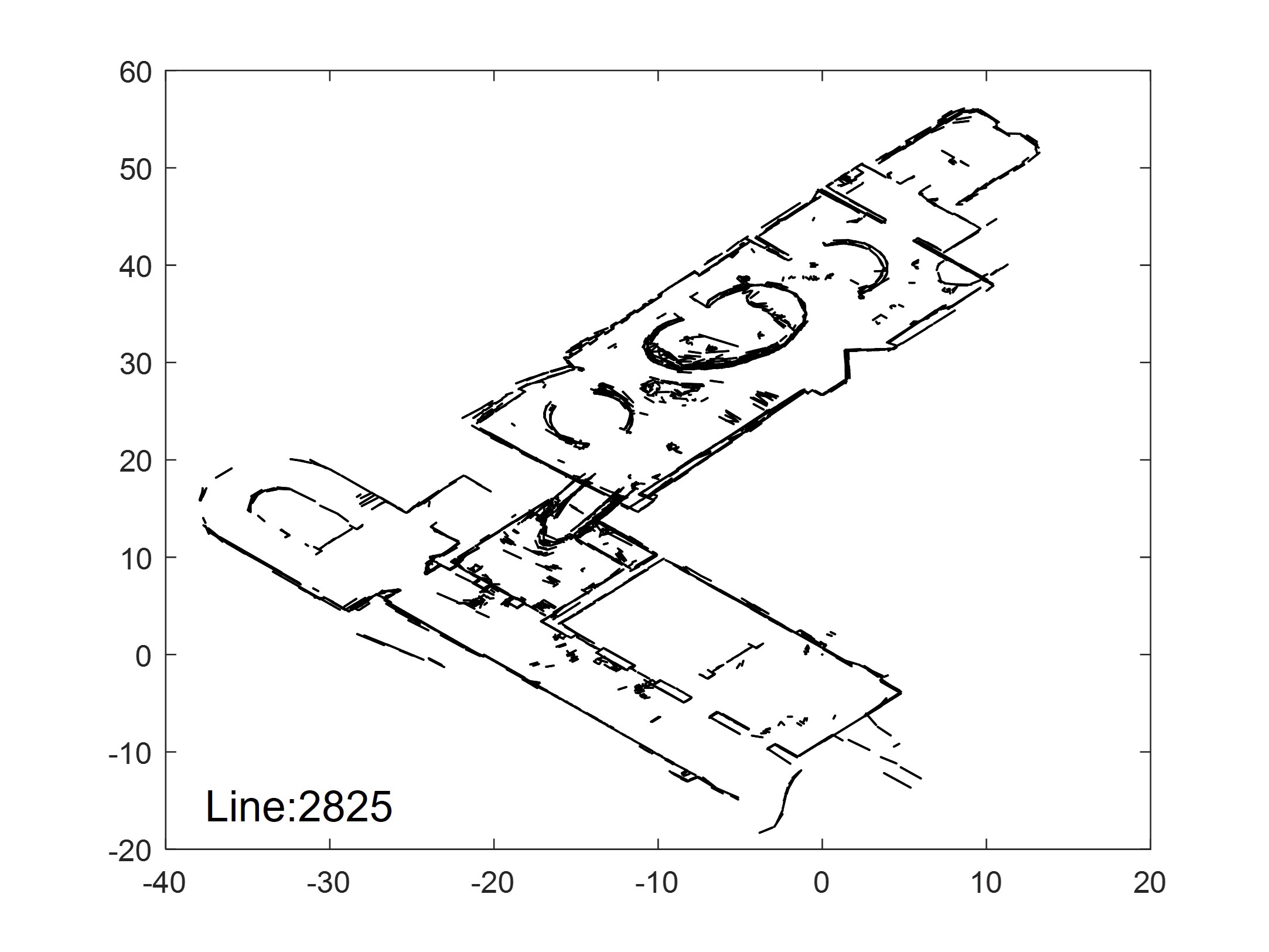 | 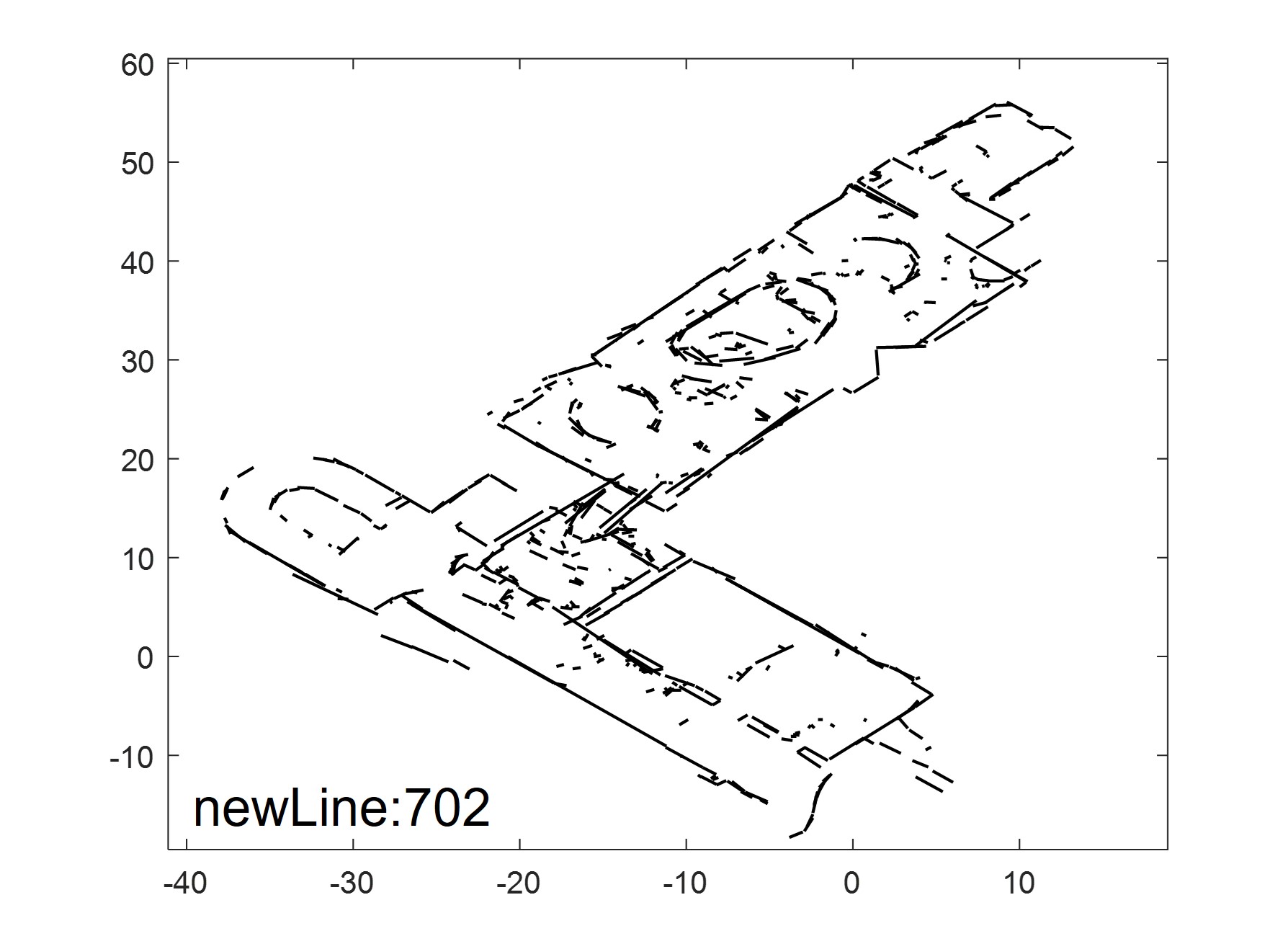 |
Figure 5. Original data w/ number of lines | Figure 6. Data after feature merging w/ num of lines |