Semi-Autonomous Snowplow
Outcomes
- Enabled the robot for semi-auto control.
- Utilized GPS and Kalman filter for localization.
- Implemented PID to minimize the error and realize pre-coded control.
- Utilized Arduino for motor control. Applied path planning algorithm on ROS.
- Published the result on ASME conference. link
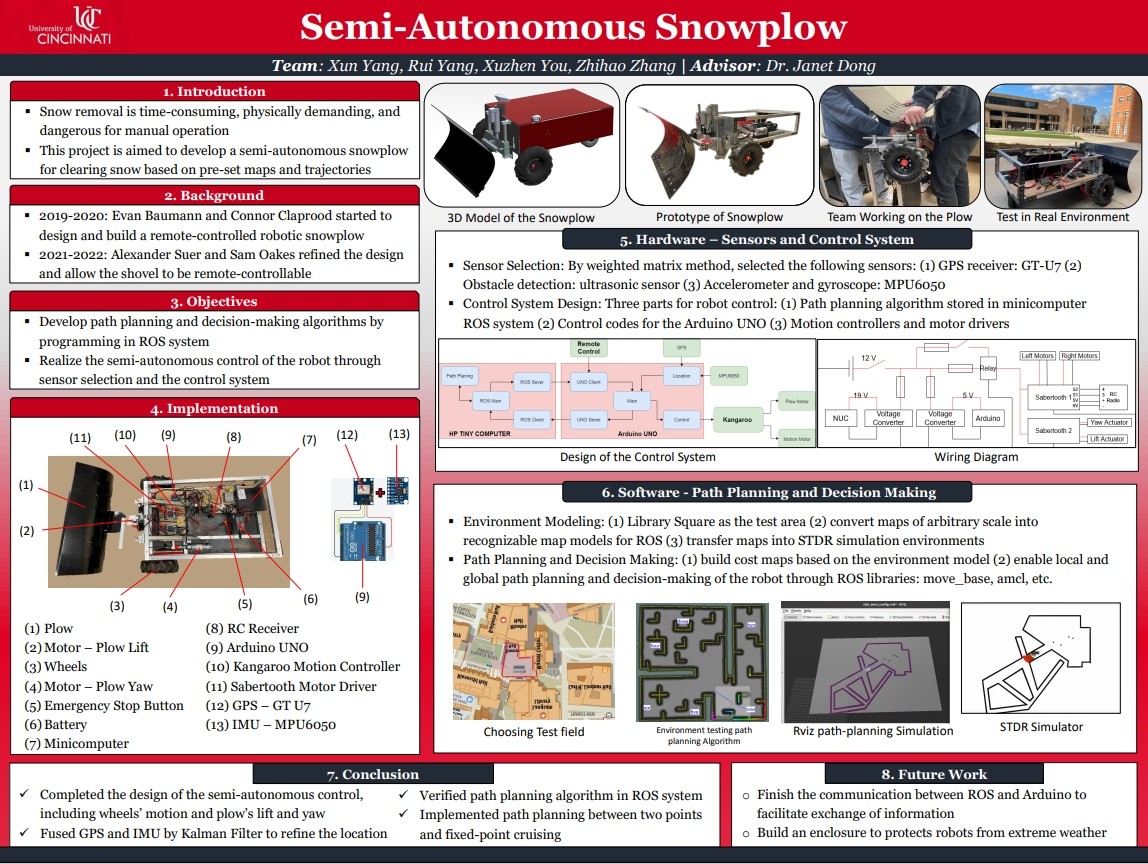
Figure 1. Project Poster