Robotic Arm Block Grasping
Overview
Armlab has two separate components:
- Computer vision, which involves Camera calibration for an RGB-D camera
- Kinematics, which involves Forward Kinematics (FK) using DH tables
Block detection
Color detection
Inverse Kinematics (IK)
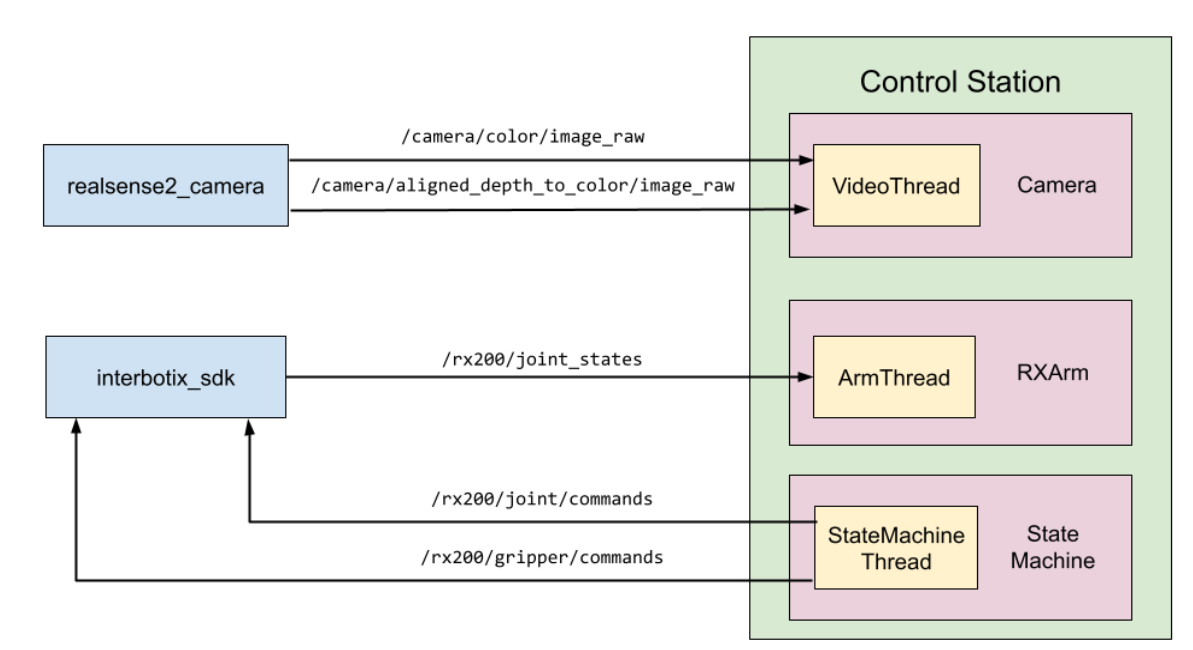
Fig 1. The control station program launches three threads