SLAM Car & Maze Test
In this lab, we worked with the MBot, a differential drive robot with 2 parallel wheels and a rear caster. Each motor is equipped with a magnetic wheel encoder. The robot also features a scanning 2D Lidar and a 3-axis IMU, and communicates via Wi-Fi with its onboard Jetson Nano compute module. Low-level motor control is implemented on the MBot Control Board using a RaspberryPi RP2040-based microcontroller.
Overview
Action
- Cascade Control & PID
- 3-DOF rigid-body coordinate transforms
- Planar kinematics of a differential-drive ground robot
- Motion models with uncertainty
Perception
- Quadrature Encoders
- MEMS Inertial Measurement Unit
- 2D LIDAR Rangefinders
- Camera and Fiducial Marker Detection
Reasoning
- Monte Carlo Localization
- Simultaneous Localization and Mapping
- A* Search
- Path Planning
Result
The car successfully navigated through a maze
Fig 1. Testing the Mbot during lab time
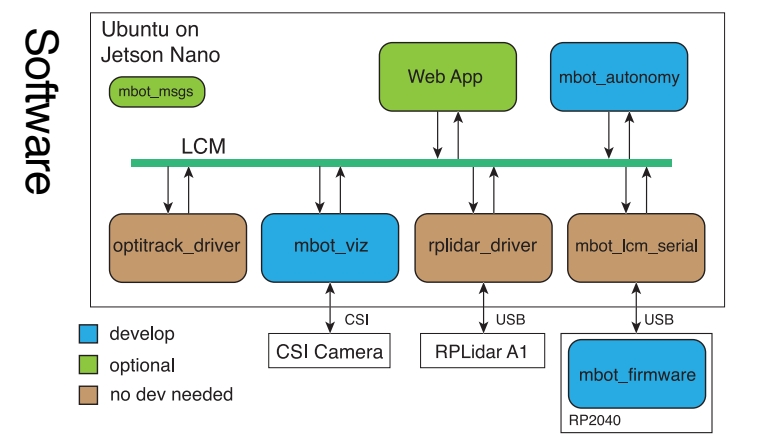
Fig 2. Hardware and Software Deployment
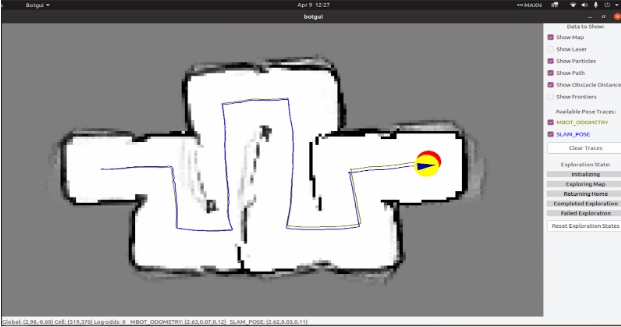
Fig 3. Result of the SLAM System